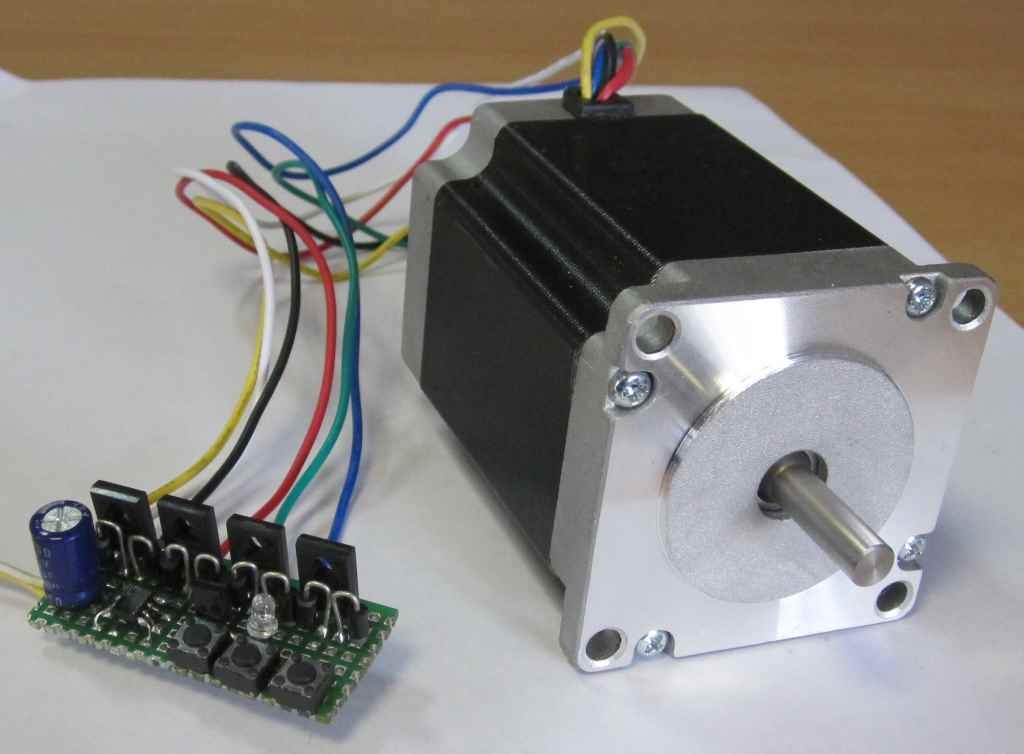
Схема управления биполярным шаговым - Контроллер шагового двигателя

ECAT-2094DS - контроллер-драйвер 4-осевого управления шаговым двигателем
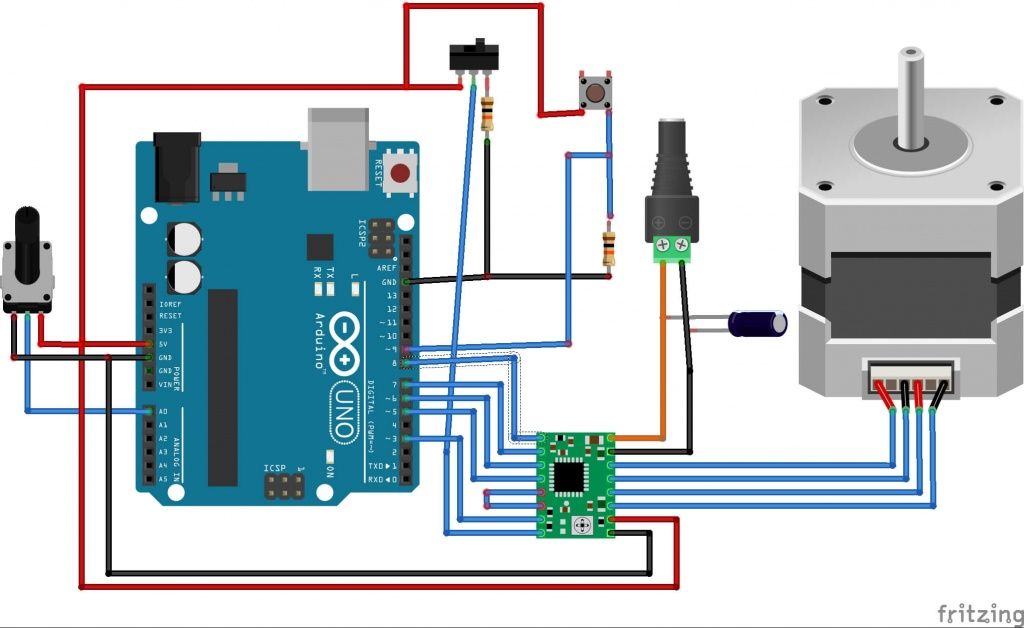
Для управления шаговыми двигателями используют специальные устройства — драйверы шаговых двигателей. Популярный драйвер шагового двигателя А работает от напряжения В и может обеспечить ток до 1 А на фазу без радиатора. Рисунок 4.




.jpg "Обзор драйвера A4988")








Принцип работы шаговых двигателей можно изложить кратко. ШД, как и все типы двигателей, состоят из статора состоящего из катушек обмоток и ротора, на котором установлены постоянные магниты. На картинке изображены 4 обмотки, расположенные на статоре под углом в 90 градусов относительно друг друга. Тип обмотки зависит от конкретного типа подключения шагового двигателя как подключить шаговый двигатель.
- Драйвер шагового дигателя управление шаговыми двигателями с помощью компьютера. В данной статье описан один из наиболее простых методов подключения нескольких шаговых двигателей к компьютеру через порт LPT, а алгоритм управления двигателями.
- Контроллер ECATDS представляет собой двухфазный биполярный драйвер шагового двигателя, одновременно управляющий четырьмя шаговыми двигателями.
- Двигатели постоянного тока нашли множество применений, но непрерывное и плавное вращение ротора не всегда требуется. Естественная особенность двигателя BLDC , заключающаяся в том, что для его вращения необходимо постоянно переключать напряжения между обмотками, способствовала развитию шаговых двигателей.
- Плата Arduino Nano, инкрементальный инкрементный энкодер EC11, драйвер для шагового двигателя DRV, макетная плата, соединительные провода, и биполярный шаговый двигатель Mitsumi. После загрузки скетча для теста контактов энкодера, можно подключать энкодер к плате Arduino Nano, как показано на этой схеме.
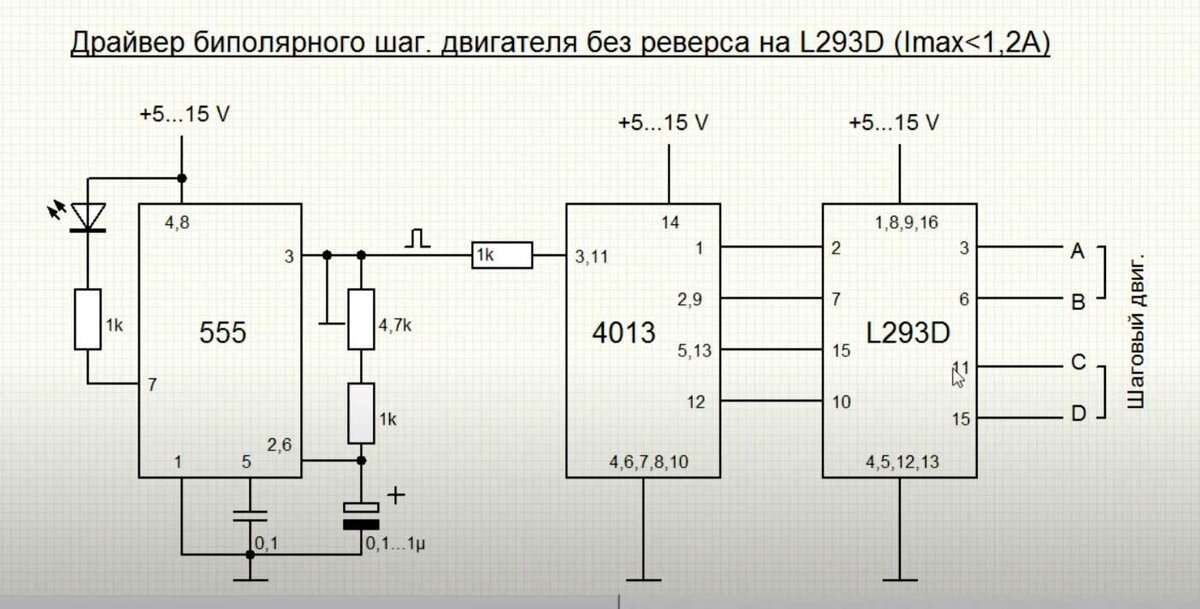
- Ниже представлена принципиальная схема драйвера биполярных шаговых двигателей с двумя L усиленный 48В, 4А. Данный драйвер может использоваться для управления практически любых 2-фазных биполярных гибридных шаговиков с 4 выводами и может обеспечить ток работы до 4 ампер при максимальном напряжении 35В.
- Современные шаговые двигатели, гибридые либо ШД на постоянных магнитах, как правило, производятся с двумя обмотками 4 вывода , с двумя обмоткми и центральными отводами 6 либо 5 выводов и с четырьмя обмотками 8-ми выводные ШД.
- В статье приводятся принципиальные схемы вариантов простого, недорогого контроллера шагового двигателя и резидентное программное обеспечение прошивка для него.
- Шаговый двигатель, если очень упрощенно, представляет из себя мотор с ротором, в котором закреплен постоянный магнит, и статором с несколькими обмотками электромагнитов. База знаний.
- Рассматриваются аспекты управления биполярным шаговым двигателем с применением драйвера LD.





Биполярный шаговый двигатель отличается от униполярного шагового двигателя тем, что полярность обмоток изменяется во время коммутации. Разом активируется половина обмоток, что обеспечивает в сравнении с униполярными шаговыми двигателями большую эффективность. У биполярных шаговых двигателей четыре провода, которые все соединяются отдельно полумостом. При коммутации полумосты прикладывают к концам обмоток положительное или отрицательное напряжение. Схема управления для биполярного шагового двигателя требует наличия мостовой схемы для каждой обмотки.